Autoprog - Picaxe
Servomoteur
Actionneur
Il permet de faire pivoter un élément (barrière)Composants
IndexLampes
Moteur
Afficheur LCD
Buzzer
Servomoteur
Bouton poussoire
Detecteur Infrarouge
Barrière Infrarouge
Microrupteur
Capteur de température
Capteur d'humidité
Capteur de luminosité
DOSSIER TECHNIQUE COMPLET
David Parein
Servomoteur

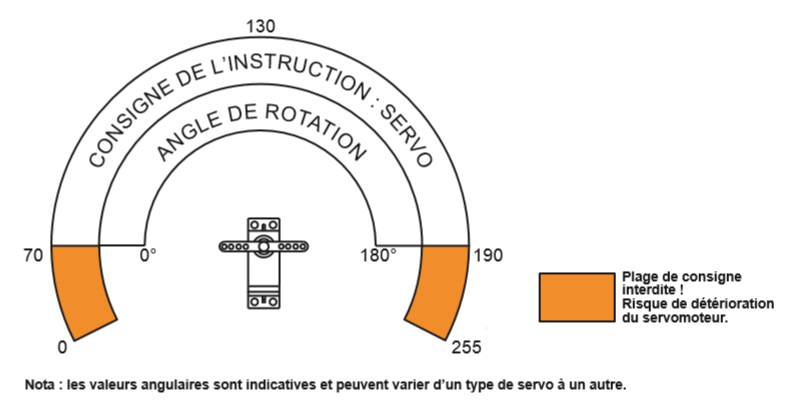
Principe de pilotage du servomoteur Dans le diagramme de programmation de Programming Editor, le servomoteur est piloté par la case d’instruction “servo” dans laquelle le déplacement est défini par un nombre entre 0 et 255. Mais la plage utile d’utilisation doit être comprise entre 70 et 210. En deça de ses valeurs (0 à 70) et au dela de ces valeurs (210 à 255), on obtiendra un fonctionnement aléatoire et même le risque de déterioration du servomoteur.
Ci-dessous tableau de correspondance du nombre à paramétrer dans la case “servo” selon le comportement attendu du servomoteur.
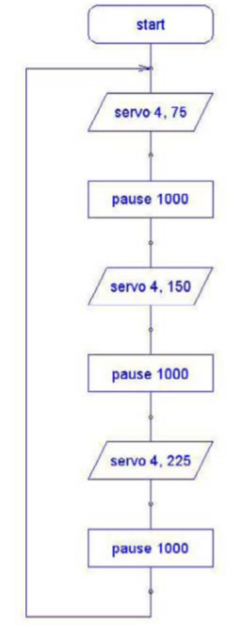
EXEMPLE DE PROGRAMME :
mettre dans trois positions différentes un servomoteur branché sur la sortie Numéro 4, attendre 1 seconde entre chaque action.
Branchement
Sur une SORTIE numérique !